JV Raghunath at Cheenta has been working on Sublinear Local to Global Quasi-geodesic Property. He shows that metric spaces that admits bounded combing satisfies sublinear local-to-global quasi-geodesic property. Subsequently he also shows that sublinearly $t-$middle recurrent quasi-geodesics are sublinearly morse quasi-geodesics.
This project is advised by myself and Dr. Arka Banerjee.
Author: Dr. Ashani Dasgupta is a PhD in Mathematics from University of Wisconsin-Milwaukee (USA). He has publication in one of leading journals in the world: Journal of Topology. He is a director at Cheenta Academy and has been coaching students for Olympiad and Research since 2010.
About the Book:
Some kids have a natural interest in mathematical science. Often school level math fails to do justice to their curiosity in the subject. Math Olympiad is a great opportunity for such children. These contests offer non-routine problems that challenges the young mind to think out of the box.
The art of thinking about mathematical problems is very beautiful. It is often non-linear in nature. It may not be bound to any one area of math. For example while thinking on an algebra problem, one may meander into the world of geometry. Again, while thinking about geometry, one may stumble upon insights in number theory.
This book is designed for children who are interested to explore the art of thinking about non-routine math. The chapters are presented in the format of a dialogue. We spend a lot of time on the process of thinking itself. The dialogues dwell upon several concepts in an interdisciplinary manner. We often digress into seemingly unrelated topics and end up with a deeper insight in the subject.
Each dialogue is punctuated with several exercise problems. The reader is encouraged to attempt them, as and when they are presented. Math can only be enjoyed by “doing”. Hopefully the reader would also be a do-er while working through the chapters.
As a final note, I should add that, secretly we hope to provoke a curiosity for research in mind of the reader. Perhaps nothing is more enjoyable and fulfilling in life than thinking about unsolved problems and creating new knowledge. The dialogues often meander into areas of mathematics that are beyond the school curriculum. This is a deliberate attempt in the part of the author to provide glimpses of the wide wild world of mathematics that lie ahead.
“শয়তানের সংখ্যা কাকে বলে জানো?” কফি হাউসে বসেছিলাম। টেবিলে ২২ টাকার ইনফিউশন কফি আর রেনল্ডসের নীল-সাদা পেন। এইসব অস্ত্র শস্ত্র নিয়ে গণিত-আড্ডা জমেছে।
শয়তানের সংখ্যা নাকি বীজগণিতের আবিষ্কার। জ্যামিতির লোকজন মাথা নেড়ে বলে, “intuition-এ পাচ্ছি না ভাই”। স্বয়ং ইউক্লিড এর হদিশ পাননি। তার জগত-বিখ্যাত পুস্তক “Elements”-এ শয়তানের সংখ্যার নামগন্ধ নেই।
প্রথম ঠাহর করেছিলেন পপাস। ভদ্রলোক মিশর দেশের আলেক্সান্দ্রিয়া শহরে থাকতেন। কায়রো থেকে শ’দুই কিলোমিটার দূরে। আপাতত আমরা কফি খেতে খেতে বুঝে নিই সেই তাজ্জব ব্যাপারখানা।
মনে করো একটা সরলরেখা L1-এর ওপর চারখানা বিন্দু আছে – A, B, C, D। বিন্দুগুলো পর পর অবস্থিত। প্রথমে A, তার ডাইনে B, এভাবে। (ছবিতে দেখো)।
তুমি শুধাতে পারো, “সরলরেখা কি? বিন্দুই বা কাকে বলে?” অত তলিয়ে ভাবলে গপ্পোটা মাঠে মারা যাবে। সেসব নিয়ে আপাতত বলছি না। মোটামুটি সরলরেখা আর বিন্দু বলতে মনের মধ্যে যে ছবিটা ভেসে ওঠা, সেটুকুই ভাবতে পারো।
খানিক দূরে, সরলরেখা L-এর বাইরে, একটা বিশেষ বিন্দু বেছে নিয়েছি। নাম দিয়েছি P। এই P বিন্দুতে যেন একটা লাইটহাউস জ্বলজ্বল করে জ্বলছে। প্রাচীন আলেক্সান্দ্রিয়াতেও নাকি এমনি এক বাতিস্তম্ভ ছিল। কে জানে, তার তলায় বসে, পপাস এসব ভাবতেন কিনা।
যদি কাগজের ওপরের দিকে P বিন্দু থাকে, তাহলে তার নীচে $L_1$ -সরলরেখা থাকবে। আরো খানিকটা নীচে $L_2$ নামে যে কোনো একটা রেখা এঁকে নাও। P থেকে যেন আলো এসে A বিন্দুতে পড়ছে। তার ছায়া পড়েছে $L_2$-রেখার ওপর $A_1$-এ। তেমনি ভাবে B -এর ছায়া $B_1$-এ, C-এর ছায়া $C_1$-এ এবং D-এর ছায়া $D_1$-এ এসে পড়েছে।
দুটো ব্যাপার মাথায় রাখা দরকার। A, B, C, D-এর মধ্যেখানের দূরত্ব যা খুশি তাই হতে পারে। $L_1$ এবং $L_2$ রেখা দুটোর মধ্যে কোনো সম্পর্ক নেই। তার যেমন খুশি ঝুঁকে থাকতে পারে (তাদের মধ্যেখানের কোণ যেমন খুশি হতে পারে)।
এবার আমরা শয়তানের সংখ্যার হদিশ পাবো।
দূরত্ব আর কোণ, এদুটোর ওপর নির্ভর করছে না এমন কোন সংখ্যা আমরা খুঁজতে চাই। A, B, C, D. আরে $A_1, B_1, C_1, D_1$-এর মধ্যে সম্পর্কতো একটা আছে। পরের বিন্দুগুলোতে ছায়া পড়েছে। এই সম্পর্কটাকে আমরা একটা সংখ্যা দিয়ে বেঁধে ফেলতে চাই। চিনে নিতে চাই।
প্রথমে C -তে দাঁড়িয়ে A আর B-কে দেখো। তাদের অনুপাত নাও।
$ \frac{CA}{CB} $
তারপর D -তে দাঁড়িয় A আর B-কে দেখো। তাদের অনুপাত নাও।
$\frac{DA}{DB}$
শেষমেশ এই অনুপাত দুটোর অনুপাত নেওয়া যাক!
$$ \frac{\frac{CA}{CB}}{\frac{DA}{DB}} $$
এই অনুপাতের অনুপাত হলো শয়তানের সংখ্যা! গণিতের ভাষায় ক্রস রেশিও। ছায়াবিন্দু-গুলো দিয়ে যদি হিসেব করো, একই সংখ্যা পাবে!
অন্য কোন সরলরেখায় যদি ছায়া পরে, সেসব ছায়াবিন্দুর অনুপাতের অনুপাত পালটাবে না। জ্যামিতির লোকজন ভেবে কুল পায়নি যে কেন এমনটা হয়। কি মধু আছে এই অনুপাতের অনুপাতে? রবার্ট হার্টশর্ন লিখেছেন, “if you are a geometer at heart, you may say it is an invention of the devil”।
পপাস এসব ভাবছিলেন খ্রিষ্টীয় চতুর্থ শতাব্দীতে। প্রায় ১৩০০ বছর পর, নবজাগরণের ইউরোপে দেসার্গাস আর পন্সেলেট ক্রস রেশিও-র পুনরাবিষ্কার করেন। তারও কিছুকাল পরে ফিলিক্স ক্লাইন জ্যামিতির নতুন সংজ্ঞা দিলেন।
বললেন প্রথমে “স্পেস”-এর একখানা বৈশিষ্ট্য K-কে পাকড়াও করো। তারপর এমন সব ফাংশনকে খুঁজে নাও যাদের অভিঘাতে K পালটায় না। যেমন ছায়া পড়লে ক্রসরেশিও পালটায় না। ক্লাইনের মতে, জ্যামিতির আদত রস হচ্ছে এসব ফাংশনের জগৎ-এ। অব্যয় কে ঘিরে নৃত্য করছে অজস্র ম্যাপ।
An arc is defined as a homeomorphism from an interval to $X$ (and its range).
Let $x, y \in X$ be any two points in an arc $J$. Then $[x, y]$ denotes the subset of the arc from $x$ to $y$.
We say $J$ is a quasi-arc if there is a number $L \geq 1$ such that $ diam ([x, y]) < L \cdot d(x, y) $ for all $x, y \in J$. This is a classical concept from geometry of metric spaces.
We propose to generalize this notion into that of coarse-arc as follows. $J$ is a $f-$ coarse arc if there exists a function $f : \mathbb{R} \to \mathbb{R} $ such that $ diam ([x, y]) < f (d(x, y)) $ for all $x, y \in J$
Moreover we say a metric space $X$ has an intrinsic curvature $f$ if any arc $J$ in $X$ can be approximated by a $f$-coarse arc and cannot be approximated by any $f’$-coarse arc such that $f’ < f$.
In this note we discuss two notions of connectedness in the context of a metric space. These are Linear Connectedness and Local Connectedness. We wish to prove that linear connectedness implies local connectedness (however the converse is not true).
Linear Connectedness or bounded turning is a geometric condition that is defined as follows:
Suppose $(X, d)$ is a metric space. We say it is $L$-linearly connected for some $L \geq 1$ if for all $x, y \in X$ there exists a compact, connected set $J \ni x, y$ of diameter less than or equal to $Ld(x, y)$.
In order to understand local connectedness, let us first define the notion of a neighbourhood.
If $X$ is a topological space and $p$ is a point in $X$, then a neighbourhood of $p$ is a subset $V$ of $X$ that includes an open set $U$ containing $p$,
$$ p \in U \subseteq V \subseteq X $$
Local connectedness in a metric space is defined as follows.
Suppose $(X, d)$ is a metric space. Let $x \in X$ and $V \ni x$ a neighbourhood of $x$. Then there exists a connected neighbourhood $U$ such that $x \in U \subseteq V$.
We wish to show that if a metric space $X$ is linearly connected then it is locally connected. In particular, suppose $x \in X$ is any point and $V$ is any neighbourhood of $x$ in $X$. Then there exists a connected neighbourhood $U$ of $x$ that is contained in $V$.
If $V$ is a neighbourhood for $x$, then $x \in \operatorname{int}(V)$ and then there exist $\epsilon>0$ such that $B(x, \epsilon) \subseteq V$.
Recall that, by assumption, $(X, d)$ is $L$-linearly connected. Choose a point $y \in B(x, \epsilon)$ such that $d(x, y) < \frac{\epsilon}{L}$. If there is no such point then $B(x,\frac{\epsilon}{L}) = \{x\}$ is a connected open set containing $x$ and we are done.
Otherwise proceed as follows.
Since $(X, d)$ is $L$-linearly connected, there exists a compact, connected set $J \ni x, y$ of diameter less than or equal to $L \times d(x, y)$. Hence $diam(J) < L \times \frac{\epsilon}{L} = \epsilon$. This implies $ J \subseteq B(x, \epsilon)$. Therefore we have a connected compact set $J$ that contains $x$ and is contained in $V$.
We essentially proved that every neighbourhood of $x \in X$ contains a connected set $J$ that also contains $x$. This property is known as weakly locally connected or connected im-kleinan.
The precise definition goes as follows:
$X$ is connected im kleinen at $x$ iff each open neighbourhood $U$ of $x$ contains an open neighbourhood $V$ of $x$ such that any pair of points in $V$ lie in some connected subset of $U$.
or equivalently $X$ is connected im kleinen at $x$ iff each open neighbourhood $U$ of $x$ contains a connected neighbourhood $V$ of $x$ (not necessarily open).
It is a theorem that:
If $X$ is connected im kleinen at each point, then $X$ is locally connected.
Hence we are done!
If $X$ is connected im kleinen at all points $x \in X$ then $X$ is locally connected.
Suppose $x \in X$ be any point. Let $U$ be any neighbourhood of $x$ in $X$. We wish to show that there is a open set $V$ contained in $U$ that contains $x$.
হাইয়া সোফিয়া নির্মাণের অঙ্ক কষেছিলেন দুই গ্রীক গণিতজ্ঞ; অ্যান্থেমিয়াস আর ইসিদোর। সে এক মস্ত অট্যালিকা নির্মাণের অঙ্ক। প্রাচীন দুনিয়ার অষ্টম বিস্ময়। তাকে গড়তে যে বেশ জটিল গণিত কষতে হবে তাতে অবাক হওয়ার কিছু নেই। তবু অবাক হয়েছি। কারণ একটা পিলে চমকানো সমবাহু সপ্তভুজ!
এই রহস্যময় সপ্তভুজের গল্প লিখছি। প্রাচীন জ্যামিতির এই মহাসমারোহ থেকে আমরা নবীনরা হয়ত কিছু শিখতে পারব। মগজের কোষগুলো রসদ পাবে।
ছিলো চার্চ প্রায় ৯০০ বছর। হয়েছিল মসজিদ তারপর ৫০০ বছর। মাঝখানে বছর ৮০ সে ছিলো বিলকুল সেকুলার মিউজিয়াম। ২০২০ সালে সে আবার মসজিদ হয়েছে। এ হেন হাইয়া সোফিয়ায় পা ফেললে বিস্মিত না হয়ে উপায় নেই। বসফরাস সাগরের তীরে সহস্রাব্দ প্রাচীন মহাঅট্যালিকা। আক্ষরিক অর্থে সে পবিত্র জ্ঞানের মন্দির। যীশু খ্রীষ্টের প্রতি সমর্পিত উপাসনালয়। ১১০০০ ক্রীতদাসের হাতে গড়া দেবতার ঘর।
হাইয়া সোফিয়ার একদম কেন্দ্রে আছে এক অদৃশ্য সপ্তভুজ। উইকিপিডিয়ায় সম্ভবত তার উল্লেখ নেই। কিন্তু আধুনিক কিছু গবেষণাপত্রে তাকে খুঁজে পাওয়া যায়। গড়নটা দেখে একটা খটকা লেগেছিল। একটু পড়ে দেখলাম ভাবনাটা মিথ্যা নয়।
অদৃশ্য সপ্তভুজের অস্তিত্ত্ব বুঝতে গেলে একটু মাথা খাটাতে হবে। হাইয়া সোফিয়ার ব্যাসিলিকা (প্রধান সভাঘর)-এর মাঝখানটা একটা লম্বাটে চতুর্ভুজ। সেই চতুর্ভুজের পুব বাহুতে একটা অর্ধগোলাকার অংশ জুড়ে গেছে। এই অংশকে খ্রীষ্টানরা বলেন অ্যাপস (apse)। অর্থোডক্স খ্রীষ্টানরা এ্যাপসের মাঝখানে বেদী গড়তেন। সেই বেদীতে (অলটারে) বলি দেওয়ার রেওয়াজ ছিল। মসজিদ হওয়ার পর অবশ্য সেই অলটারের অস্তিত্ত্ব মুছে গেছে।
প্রাচীন চার্চে ব্যাসিলিকার এই হত গড়ন। অ্যাপসের আকৃতি অর্ধগোলাকার। আগেই বলেছি যে সে সভাগৃহের চতুর্ভুজ মধ্যভাগের সাথে জুড়ে থাকে। এই অর্ধগোলাকার অংশকে যদি মনে মনে পূর্ণবৃত্ত করে দেওয়া যায়, তাহলে তাকে circumscribe করে (অর্থাৎ ঘিরে) থাকবে একটা কাল্পনিক বহুভুজ। এই বহুভুজকে নির্মাণের পর আর চোখে দেখা যায় না। শুধু তার কয়েকটা বাহু বরাবর দেওয়াল নির্মিত হয়। সেসব দেয়ালে বড় বড় জানলা থাকে। নির্মাতারা এমন ভাবে এই জানলাগুলো বানাতেন আর এ্যাপসের দেয়াল এমন এ্যাঙ্গেলে (কোণে) নির্মাণ করতেন যে বিশেষ মাহেন্দ্রক্ষণে সূর্যের আলোকরশ্মি বলির বেদীতে (অলটারে) প্রক্ষিপ্ত হত। সম্ভবত দেবতার ঘরকে আরও অপার্থিব রূপ দেওয়ার জন্য এসব কাণ্ড করা হত।
অন্যান্য চার্চে এই (অদৃশ্য) বহুভুজটা (যে কিনা অ্যাপসকে ঘিরে আছে) সাধারণত পঞ্চভুজ অথবা ষড়ভুজ হত। কারণটা একদম গাণীতিক। কম্পাস আর স্ট্রেটএজ (অর্থাৎ দাগ না দেওয়া রুলার) দিয়ে সমবাহু বহুভুজ যদি আঁকতে চাও তাহলে ত্রিভুজ আঁকতে পারবে, চতুর্ভুজ পারবে, পঞ্চভুজ পারবে, ষড়ভুজ পারবে, কিন্তু সপ্তভুজ পারবে না!
কেন পারবে না?
সেটা বুঝতে মানুষের প্রায় ২০০০ বছর সময় লেগেছে।
বাহুর দৈর্ঘ্য যদি constructible সংখ্যা হয়, তবেই তাকে কম্পাস আর স্ট্রেটএজ দিয়ে আঁকা সম্ভব। কাকে বলে কন্সট্রাকটিবল সংখ্যা? যদি তুমি সংখ্যাটাকে সসীম গোটা সংখ্যার (finite number of integer) যোগ, বিয়োগ, গুণ, ভাগ আর বর্গমুল দিয়ে লিখতে পারো তবেই সে হবে constructible। প্রমাণ করা সম্ভব যে একমাত্র এই ধরণের দৈর্ঘ্যকেই কম্পাস আর স্ট্রেটএজ দিয়ে আঁকা যায়। যদিচ এটা প্রমাণ করতে মানুষের হাজার হাজার বছর সময় লেগেছে। সমবাহু সপ্তভুজের বাহুর দৈর্ঘ্য কন্সট্রাক্টিবল নয়। তাই তাকে কম্পাস আর স্ট্রেটএজ দিয়ে আঁকা যায় না।
অতএব বুঝতেই পারছ যে এ্যাপসের বাইরে যে অদৃশ্য সমবাহু সপ্তভুজ এ্যান্থেনিয়াম আর ইসেদোর গড়েছিলেন তার নিঁখুত নির্মাণ কম্পাস আর স্ট্রেটএজ দিয়ে সম্ভব হত না। তাহলে কি ভাবে অসম্ভবকে সম্ভব করেছিলেন তারা?
জ্যামিতিতে আরেক রকমের (নির্মাণ) কন্সট্রাকশন হয়। এই কনস্ট্রাকশনটার উদ্ভাবক সম্ভবত আর্কিমিডিস। একে বলে neusis construction। এই পদ্ধতিতে সমবাহু সপ্তভুজ আঁকা যায়। হাইয়া সোফিয়ার স্থপতিরা এই পদ্ধতি জানতেন বলেই মনে হয়। এই কায়দায় অনেক ভাবেই সমবাহু সপ্তভুজ আঁকা যায়। আধুনিক কালে জেভিড জনসন লিইস্ক একটা কায়দা বার করেছেন। এই ভদ্রলোক শখের গণিতজ্ঞ। প্রথম জীবনে কমিক্স আঁকতেন, ছোটদের জন্য লিখতেন। পরে গণিতে আগ্রহ জন্মায়। গণিত এবং চিত্রকলা নিয়ে এসারের মত এঁর কাজও প্রখ্যাত।
জনসনের কায়দাটা খানিকটা এরকম (ছবির সাথে মিলিয়ে নিতে পারো) –
রুলারের ওপর দুটো দাগ দিয়ে নাও। দাগ দুটো একে অপরের ১ ইঞ্চি তফাতে থাকবে।
কাগজে একটা রেখাংশ, AB, আঁকো (১ ইঞ্চি দৈর্ঘ্য)। তার ওপরে AC লম্ব আঁকো। তারপর BC জুড়ে দাও। এবার B-কে কেন্দ্র আর BC-কে রেডিয়াস করে একটা বৃত্ত আঁকো। AB-র কেন্দ্রবিন্দুতে AB-র ওপর একটা লম্ব L আঁকো।
এবার নিউসিস করতে হবে। অর্থাৎ এক ইঞ্চি সমান একটা দৈর্ঘ্য-কে খাপে খাপে বসাতে হবে। প্রথমে A বিন্দুর ওপর স্কেলটা লম্ব ভাবে বসাও। তারপর A বিন্দুর দিকে রুলারটা হাত দিয়ে চেপে রেখে স্কেলের অপর মুখটা ঘোরাতে থাকো। এমন একটা জায়গা অবধি ঘোরাও যাতে স্কেলের মধ্যে এক ইঞ্চি মাপটার একটা ডগা L-এর ওপর থাকে আর একটা ডগা ঠিক বৃত্তের ওপর। যে ডগাটা L- কে ছেদ করল তার নাম দাও D। এবার ADB-র ওপর একটা বৃত্ত আঁকো আর AB-কে একটা বাহু করে সমবাহু সপ্তভুজ এঁকে ফেলো।
হাইয়া সোফিয়ার দুই স্থপতি সম্ভবত এরকম কোনো একটা পদ্ধতি জানতেন। তাই তারা সমবাহু সপ্তভুজ গড়তে পেরেছিলেন। ফলাফলটা হয়েছিলো দৃশ্যত অলৌকিক।
পঁচিশে ডিসেম্বরে, দিনমানের তৃতীয় প্রহরে, সূর্যের আলো ঠিক হাইয়া সোফিয়ার অলটারে এসে পড়ত। এই সময়টা খ্রীষ্টানদের মতে একটা পবিত্র কালখন্ড। বলে রাখা ভালো, প্রাচীনকালে ঘন্টা মিনিটের হিসেবটা একটু অন্যরকম ছিলো। দিন সবসময়েই বারো ঘন্টার, রাতও বারো ঘন্টার। অতএব ঋতু অনুসারে ঘন্টার মাপ ছোটবড় হত। পঁচিশে ডিসেম্বরের প্রবল শীতে প্রভাতের তৃতীয় ঘন্টা ইস্তানবুলে ঠিক কখন হবে, সে সময় সূর্যের আলো কোন এ্যাঙ্গেলে পড়বে, তার একটা জটিল হিসেব কষে নির্মাতার এ্যাপস বানিয়েছিলেন। সপ্তভুজ গড়তে হয়েছিল সেই কারণেই।
Sur les Groupes Hyperboliques d’après Mikhael Gromov is a celebrated work in elementary geometric theory. In the geometric group theory research group at Cheenta Academy, we translated it from French to English.
The final copy is retracted due to a note from springer. If need more information drop an email at ashani.dasgupta@cheenta.com
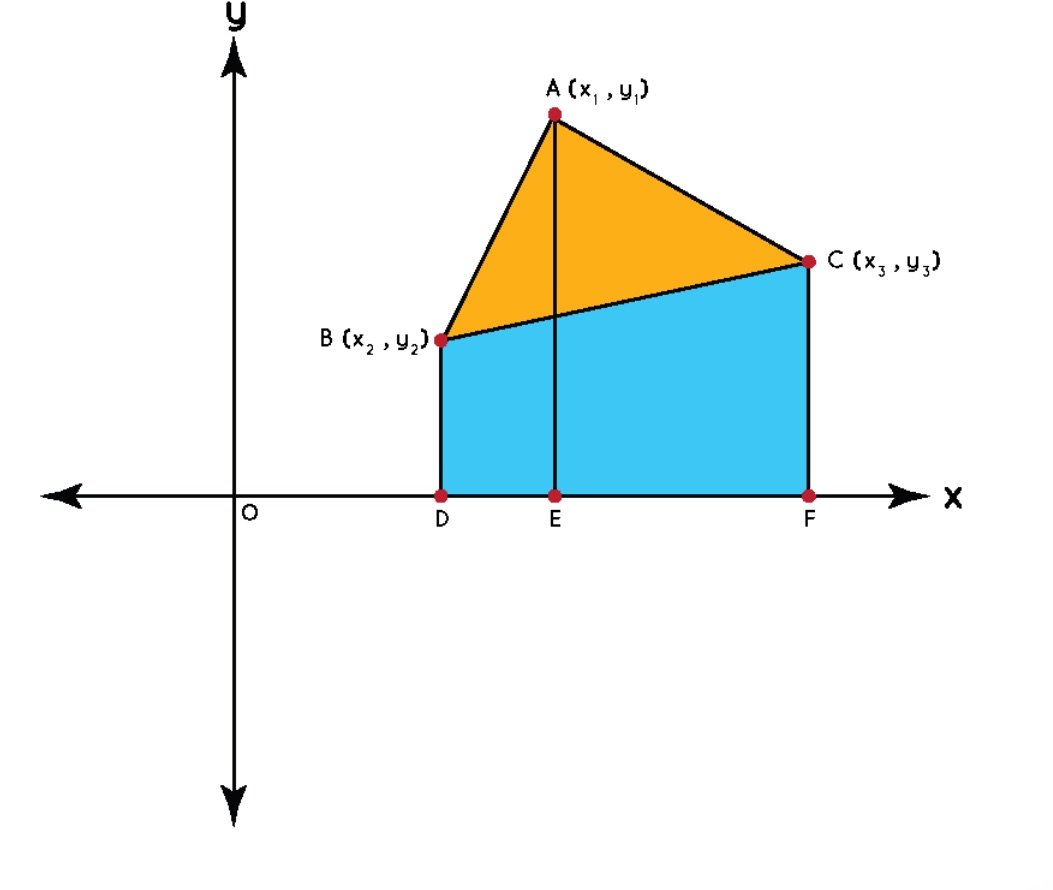
ব্যাপারটা খোলসা করা যাক। প্রথমে একটা ত্রিভুজ এঁকে ফেলো গ্রাফ পেপারে। প্রতিটা বিন্দুর একটা করে coordinate থাকবে।
ত্রিভুজ এঁকেছি গ্রাফ পেপারে
ত্রিভুজটার ক্ষেত্রফলের একটা ফর্মুলা খোঁজা যাক। এমনিতে ত্রিভুজের ক্ষেত্রফল হচ্ছে
$$ \frac{1}{2} \times base \times height $$
কিন্তু আমরা ঠিক তেমন ফর্মুলা চাইছি না। আমরা কোনবিন্দুদের coordinate দিয়ে ক্ষেত্রফল লিখে ফেলতে চাই।
তিনটে কোন থেকে x-axis-এর ওপক লম্ব (perpendicular) এঁকে নাও। সহসা তিনটে ট্রাপিজিয়াম আবির্ভুত হবে।
দুটো ট্রাপিজিয়াম যোগ করে একটা বিয়োগ করলে, ত্রিভুজের ক্ষেত্রফল পাওয়া যাবে।
$$ ABDE + ACFE – BCFD = \Delta ABC $$
Trapezium -এর ক্ষেত্রফলের সূত্র বেশ সোজা। সমান্তরাল দুটো বাহু যোগ করো। যোগফল-কে সমান্তরাল বাহুর দুরত্ত্ব দিয়ে গুণ করো। শেষমেশ ২ দিয়ে ভাগ করে দাও। ব্যাস হয়ে গেলো।
$$ \frac{1}{2} \times \textrm{(sum of parallel sides)} $$
$$ \times \textrm{(distance between parallel sides)} $$
(এই সূত্রটা ওই ত্রিভুজের ক্ষেত্রফলের সূত্র থেকেই পাওয়া যায়। Trapezium-কে দুই টুকরো করে নাও যে কোনো diagonal এঁকে। তারপর সেই ত্রিভুজ টুকরো দুটোর ক্ষেত্রফল যোগ করো।)
Coordinate দিয়ে ত্রিভুজের ক্ষেত্রফল লিখতে গেলে, তোমায় Trapezium-কে ছুঁয়ে আসতে হবে। এবার প্রশ্ন হলো এই তিনটে ট্রাপিজিয়াম কখন parallelogram হতে পারে? মনে মনে ভাবো যে BC হচ্ছে x-axis-এর সমান্তরাল। তা হলে BCFD হয়ে যাবে paralleogram। বাকি দুটো Trapezium কিন্তু parallogram হবে না। এক কাজ করো। A বিন্দুকে ক্রমশ BC-র দিকে নামিয়ে আনো। দেখবে ABDE আর ACFE ক্রমশ parallelogram হয়ে উঠছে। যেই না A বিন্দুটা BC স্পর্শ করবে, তারা parallelogram হয়ে যাবে। ত্রিভুজের ক্ষেত্রফল হয়ে যাবে ০।
তাহলে এভাবে ভাবতে পারো যে trapezium দুটোর parallelogram না হওয়ার কারণ হলো A বিন্দুর মাথা উঁচিয়ে থাকা। সে মাথা নামালেই সব সমান্তরাল হয়ে যাবে।
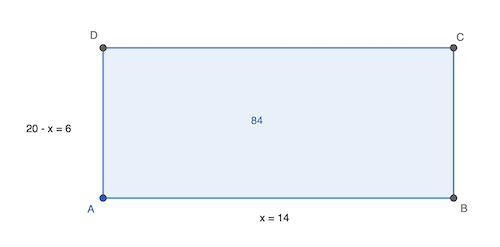
মনে করো তোমার কাছে চল্লিশটা ইঁট আছে। প্রতিটি ইঁট এক ফুট লম্বা। তুমি একটা rectangle বানাতে চাও। কিন্তু যেমন তেমন একটা rectangle বানালে হবে না। যে চতুর্ভুজটা বানাবে তার ক্ষেত্রফল যতটা সম্ভব বড় হতে হবে।
ধরো লম্বা লম্বি ষোলো ফুট ইঁট বসালে। আড়াআড়ি বসল চার ফুট ইঁট। ক্ষেত্রফল হলো চার – ষোলো চৌষট্টি। কিন্তু যদি লম্বা লম্বি চোদ্দ ফুট ইঁট বসাও আর আড়াআড়ি ছয় ফুট করে, তাহলে ক্ষেত্রফল হবে ছয় গুণ চোদ্দো সমান চুরাশি! মানে ক্ষেত্রফল বেড়ে গেল।
ঠিক কি রকমের চতুর্ভুজ বানালে সবচে বেশি ক্ষেত্রফল ঘিরে ফেলা যায়? এই সত্যে কিন্তু অঙ্ক কষে পৌঁছানো যেতে পারে।
ধরা যাক রেকট্যাঙ্গেলটার একটা বাহু হলো x ফুট। তবে অন্য বাহু হবে 20 – x ফুট। ক্ষেত্রফল হবে $$ x(20-x) = 20x – x^2 $$
এই এক্সপ্রেশনটা আমরা একটু ঘুরিয়ে লিখব।
$$ 10^2 – (10^2 – 2 \times 10 \times x + x^2) $$
এবার কিন্তু আমরা সত্যের কাছাকাছি। ক্ষেত্রফল হচ্ছে।
$$ 100 – (10 – x)^2 $$
এই সংখ্যাটা সবসময় ১০০-র থেকে কম হবে কারণ আমরা ১০০-র থেকে একটা বর্গ সংখ্যা বিয়োগ করছি। বর্গ সংখ্যা সর্বদা পজিটিভ হয়। অতএব আমরা ১০০-র থেকে কোনো একটা পজিটিভ সংখ্যা বিয়োগ করছি। অতএব ক্ষেত্রফল ১০০-র কিছুটা কম হবে।
আমরা যেহেতু ক্ষেত্রফলের সর্বোচ্চ সম্ভাব্য মান চাই, অতএব, \( (10-x)^2 \) যতটা পারা যায় কমিয়ে ফেলা যাক। ভেবে দেখো x = 10 হলে \( (10-x)^2 \) মান সবচেয়ে কম হবে (০ হয়ে যাবে)। x = 10 যেই না বসিয়েছো, রেক্ট্যাঙ্গেলটা বেমালুম স্কোয়ার হয়ে গেছে!
অর্থাৎ এক গুচ্ছ rectangle-কে এবার ক্রমশ square হয়ে উঠতে দেখা যাচ্ছে মানসচক্ষে। যত আমরা ক্ষেত্রফল বাড়াচ্ছি rectangle-এর square-পনা বেড়ে চলেছে। শেষমেশ সে স্কোয়ার হয়েই যাচ্ছে। সেখানেই তার মুক্তি। সেখানেই তার ক্ষেত্রফলের উর্ধ সীমা।